Représentation vectorielle de signaux sinusoïdaux
En première approximation, on peut considérer que les différents signaux présents sur un réseau d'énergie (tensions et courants) sont purement sinusoïdaux de fréquence imposée par les alternateurs : 50 Hz (Europe, Maghreb,..) ou 60 Hz (USA, ...).
Dès lors, l'étude en régime permanent, à la fréquence fondamentale, d'un tel réseau et des différents éléments qui le composent permet déjà d'en comprendre les grands principes de fonctionnement.
Dans ce contexte, la représentation et le traitement de signaux sinusoïdaux prend une importance toute particulière.
Un réseau de production, transport, distribution et de consommation d'énergie électrique est un système complexe qui est fréquemment le siège de phénomènes transitoires (manœuvres, défauts, à-coups de charges, ...), et/ou non linéaires (saturation de transformateurs, démarrage de moteurs, conversion d'énergie).

On peut faire correspondre à toute fonction sinusoïdale, un vecteur de Fresnel partant de l'origine du repère, de module « l'amplitude de la fonction » et faisant un angle égale à sa phase instantanée avec l'axe ( Ox ) pris comme origine des phases, grâce à sa projection sur l'axe ( Ox ).
Par exemple, pour une tension u = U.√2. cos( ωt + φ ) quand on dessine U le vecteur de Fresnel associé, on trouve bien « u » en projection sur (Ox).
Par convention on représentera les vecteurs de Fresnel à t = 0 et avec comme module la valeur efficace de la grandeur considérée.
Forme Polaire (représentation de Fresnel)

Dans le cadre de la représentation de plusieurs grandeurs, tel que tension et courant, sur un même diagramme de Fresnel, on ne peut représenter que des grandeurs ayant la même pulsation.
NB: Le déphasage entre les deux vecteurs " φ "sera noté "phi ".

Ecriture sous forme Polaire

Représentons l’axe des réels par une droite graduée, d’origine « O » ; la multiplication de 1 par (-1), envoie 1 sur (-1), qui est l’image de 1 par la symétrie de ce centre « O », que l’on peut aussi considérer comme étant la rotation de ce centre « O », d’angle π.
De même, la multiplication de (-1) par (-1) envoie (-1) sur 1.
Notons « i » le point image de 1 par la rotation de centre « O » et d’angle π/2 : ce point n’est plus sur la droite initiale, mais sur la perpendiculaire (axes imaginaires) à celle-ci passant par l’origine.
Si à présent on applique une même rotation du point « i », que l’on multiplie par lui-même « i », on obtient le point en (-1) situé sur la droite des réels.
Cet objet jouit du statut de nombre et est appelé « nombre imaginaire ».
Forme Rectangulaire (représentation complexe)

Dans ce cas on peut donc en déduire que:

La multiplication de « i », permet donc de définir une racine carrée au nombre (-1), puisque on a alors :

Application vectorielle
En électricité, afin de ne pas confondre avec l’intensité du courant « i », la notation imaginaire sera nommée « J ».
Imaginons donc le plan orthonormé complexe possédant « Ox » comme axe des réels et l’axe « Oy » comme axe des imaginaires.
L’opérateur « J» permet d’effectuer une rotation de π/2 ou (90°) à un vecteur.
Si nous faisons subir au vecteur U une rotation de + 90°, il devient « J.U ».
De même, si nous faisons subir au vecteur « J.U » une rotation de + 90°, il devient « J.J.U », soit « J².U ».
Or une rotation de deux fois 90° (c’est-à-dire 180°) correspond à un changement de signe du vecteur U.
Nous avons donc la relation : « J²=-1 », avec « J » étant appelée « nombre imaginaire ».


Une transposition de la représentation de Fresnel est alors facile, les vecteurs sont décomposés en vecteurs orthogonaux et notés sous la forme :

Ils représentent respectivement les vecteurs projections sur l’axe Ox et l’axe Oy.

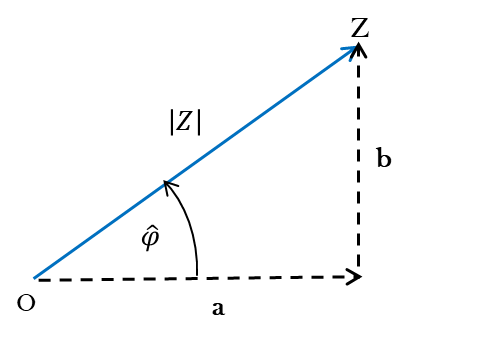
a et b sont les deux composantes du vecteur auquel nous associons le nombre complexe «Z » .
« a » représente la partie réelle du nombre complexe et « b » désigne sa partie imaginaire.

La distance |Z|= |OZ|, que l’on appelle " module de Z " et l’angle φ est appelé « argument de Z »
Dans le cadre du nombre complexe " Z ", on peux l'exprimer sous la forme :

Conversion vectorielle (Polaire vers rectangulaire)
Considérons un vecteur Z, dont l’amplitude est |Z|, incliné d’un angle φ
On peut donc écrire sous la forme polaire

D’autre part, en utilisant la forme rectangulaire, on obtient :

-
La composante horizontale de « Z » a une amplitude « a » donnée par :

-
La composante horizontale de « Z » a une amplitude « b » donnée par :

On peut donc écrire :

Exemple
Partons d'un vecteur V exprimé sous sa forme polaire : V=106⌊148°

Conversion vectorielle (Rectangulaire vers Polaire)
En regardant la figure, on constate que |Z| est l’hypoténuse du triangle ainsi formé et que l’on peut donc appliqué la théorie de Pythagore.
On procède comme suit :
On détermine le module :

De plus l’angle φ est donné par :
Exemple
Un vecteur « V » est exprimé sous forme rectangulaire : V= - 35 + J 12
L’amplitude du vecteur est:

L’angle du vecteur est :

Notation positive : φ = - 18,92°+180° = 161,08°

Par conséquent, la forme polaire du vecteur est :